Processes and Threads
Tom Kelliher, CS 311
Feb. 20, 2012
Announcements:
Exam in one week.
From last time:
- Adding a syscall to the kernel.
Outline:
- Syscall assignment.
- Processes.
- Threads.
- Program in execution.
- Serial, ordered execution within a single process. (Contrast task with multiple threads.)
- ``Parallel'' unordered execution between processes.
Three issues to address
- Specification and implementation of processes -- the issue of
concurrency (raises the issue of the primitive operations).
- Resolution of competition for resources: CPU, memory, I/O
devices, etc.
- Provision for communication between processes.
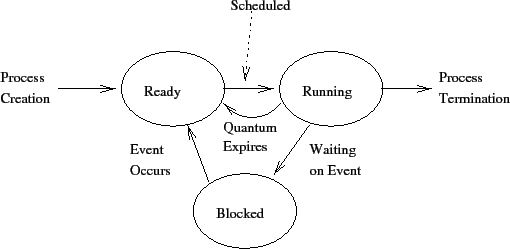
Three possible states for a process:
- Running -- currently being executed by the processor
- Ready -- waiting to get the processor
- Blocked (waiting) -- waiting for an event to occur: I/O
completion, signal, etc. (Suspended -- ready to run but not eligible.)
How many in each state?
Kept in a process control block (PCB) for each process:
- Code (possibly shared among processes).
- Execution stack -- stack frames.
- CPU state -- general purpose registers, PC, status register, etc.
- Heap -- dynamically allocated storage.
- State -- running, ready, blocked, zombie, etc.
- Scheduling information -- priority, total CPU time, wall time, last
burst, etc.
- Memory management -- page, segment tables.
- I/O status -- devices allocated, open files, pending I/O requests,
postponed resource requests (deadlock avoidance).
- Accounting -- owner, CPU time, disk usage, parent, child processes,
etc.
Contrast program.
PCB updated during context switches (kernel in control).
Should a process be able to manipulate its PCB?
Determination of which process to run next (CPU scheduling).
Multiple queues for holding processes:
- Ready queue -- priority order.
- I/O queues -- request order.
Consider a disk write:
- Syscall.
- Schedule the write.
- Modify PCB state, move to I/O queue.
- Call short term scheduler to perform context switch.
Is it necessary to wait on a disk write?
- Event queues -- waiting on child completion, sleeping on timer, waiting
for request (inetd).
Three types of schedulers:
- Long term scheduler.
- Medium term scheduler.
- Short term (CPU) scheduler.
Determines overall job mix:
- Balance of I/O, CPU bound jobs.
- Attempts to maximize CPU utilization, throughput, or some other
measure.
- Runs infrequently.
Cleans up after poor long term scheduler decisions:
- Over-committed memory -- thrashing.
- Determines candidate processes for suspending and paging out.
- Decreases degree of multiprogramming.
- Runs only when needed.
Decides which process to run next:
- Picks among processes in ready queue.
- Priority function.
- Runs frequently -- must be efficient.
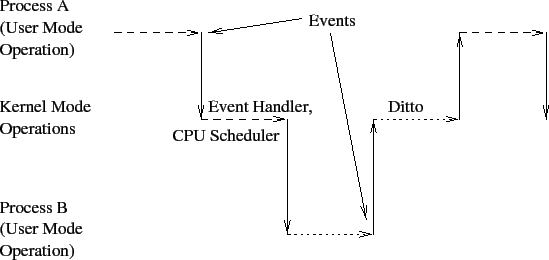
Time line schematic:
Parent, child.
Where does the child's resources come from? By ``resources'' we mean:
- Stack.
- Heap.
- Code.
- Environment -- environment variables, open files, devices, etc.
Design questions:
- New text, same text?
- Make a copy of the memory areas? (Expensive.)
- Copy the environment?
- How are open files handled?
Solutions to the ``copy the parent's address space'' problem:
- Copy on write -- Mark all parent's pages read only and shared by
parent & child. On any attempted write to such a page, make a copy and
assign it to child. Fix page tables.
- vfork -- No copying at all. It is assumed that child will
perform an exec, which provides a private address space.
Heavyweight process -- expensive context switch.
Thread:
- Lightweight process.
- Consist of PC, general purpose register state, stack.
- Shares code, heap, resources with peer threads.
- Easy context switches.
Task: peer threads, shared memory and resources.
Can peer threads scribble over each other?
What about non-peer threads?
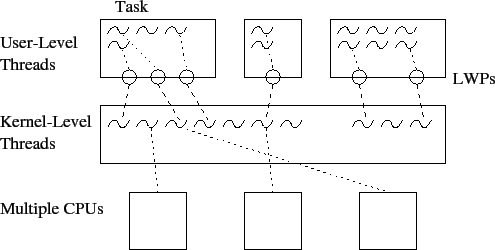
User-level threads:
- Implemented in user-level libraries; no system calls.
- Kernel only knows about the task.
- Threads schedule themselves within task.
- Advantage: fast context switch.
- Disadvantages:
- Unbalanced kernel level scheduling.
- If one thread blocks on a system call, peer threads are also
blocked.
Kernel-level threads:
- Kernel knows of individual threads.
- Advantage: If a thread blocks, its peers can still proceed.
- Disadvantage: Slower context switch (kernel involved).
How do threads compare to processes?
- Context switch time.
- Shared data space. (Improved throughput for file server: shared data,
quicker response.)
User-level threads multiplexed upon lightweight processes:
Basics: send(), receive() primitives.
Design Issues:
- Link establishment mechanisms:
- Direct or indirect naming.
- Circuit or no circuit.
- More than two processes per link (multicasting).
- Link buffering:
- Zero capacity.
- Bounded capacity.
- Infinite capacity.
- Variable- or fixed-size messages.
- Unidirectional or bidirectional links (symmetry).
- Resolving lost messages.
- Resolving out-of-order messages.
- Resolving duplicated messages.
Resources owned by kernel.
Messages kept in a queue.
Assume:
- Only allocating process may execute receive.
- Any process (including ``owner'') may send.
- Variable-sized messages.
- Infinite capacity.
Primitives:
- int AllocateMB(void)
- int Send(int mb, char* message)
- int Receive(int mb, char* message)
- int FreeMB(int mb)
Consider:
Process1()
{
...
S1;
...
}
Process2()
{
...
S2;
...
}
How can we guarantee that S1 executes before S2?
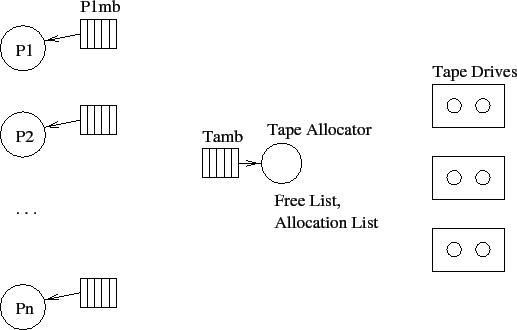
The situation:
Tape allocator process:
initialize();
while (1)
{
Receive(Tamb, message);
if (message is a request)
if (there are enough tape drives)
for each tape drive being allocated
{
fork a handler daemon;
send daemon mb # in message to requesting process;
update lists;
}
else
send a rejection message;
else if (message is a return)
{
update lists;
send an ack message;
}
else
ignore illegal messages;
}
Summary of user process actions:
- Send request to tape allocator.
- Receive message back giving mailbox(es) to use in communicating with
tape drive(s).
- Start sending/receiving with tape drive daemon(s).
- Close tape drives.
- Send message to tape allocator returning tape drive(s).
Thomas P. Kelliher
2012-02-19
Tom Kelliher