placeBalls():
- Placement of the first ball along unit circle.
Velocity computation. Target: origin. Scaling velocity.
Translating position to circle of radius 40.
- Avoiding initial collision: Constrained placement of second ball;
 or more away.
or more away.
- Options: Aiming second ball at a point other than the origin.
Computing and normalizing the velocity vector.
Making the second ball stationary, at an arbitrary position.
idle():
- Updating ball position -- this is animation.
- Collision detection and response,
 checks.
checks.
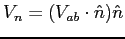
- Beginning the next simulation when either ball leaves the
``arena.'' No square roots.
- Post a re-display event to render the new scene.
collision()
- Simply, if the distance between the centers points is less than or
equal to the sum of the radii, we've had a collision.
- No square roots.
- Discrete time step simulation: penetration problems.
collisionResponse()
- Dealing with penetration:
- Binary search over time step interval to find exact point of
impact and take it from there. Computationally expensive.
- Ignore. Approximate collision point and normal. Allow
collision response to push objects apart. May not look realistic, if
collision response doesn't separate objects quickly enough.
- Approximate collision normal and move each object 1/2 of
penetration distance apart along normal. This may look abrupt.
Could cause a cascade of penetrations. Assumes equal forces
involved.
This is what we use.
- Binary search over time step interval to find exact point of
impact and take it from there. Computationally expensive.
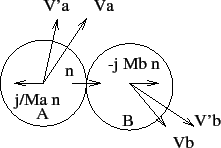
- We apply equal and opposite impulses along the collision normal to
the two objects to bring them apart.
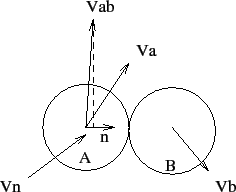
- Collision normal (
 ), relative velocity vector (
), relative velocity vector ( ),
and the projection back onto the normal (
),
and the projection back onto the normal ( ):
):
- Coefficient of restitution:
 , or
, or

- Conservation of momentum:
 or:
or:
Similarly for .
.
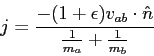
- Substituting and solving for
 :
: